
SMA-based Variable Stiffness Actuator
This adaptive robotic actuator project features a prototype based on the Mechanically Adjustable Compliance and Controllable Equilibrium Position Actuator (MACCEPA) framework, designed for safe and adaptable robotic joint articulation. 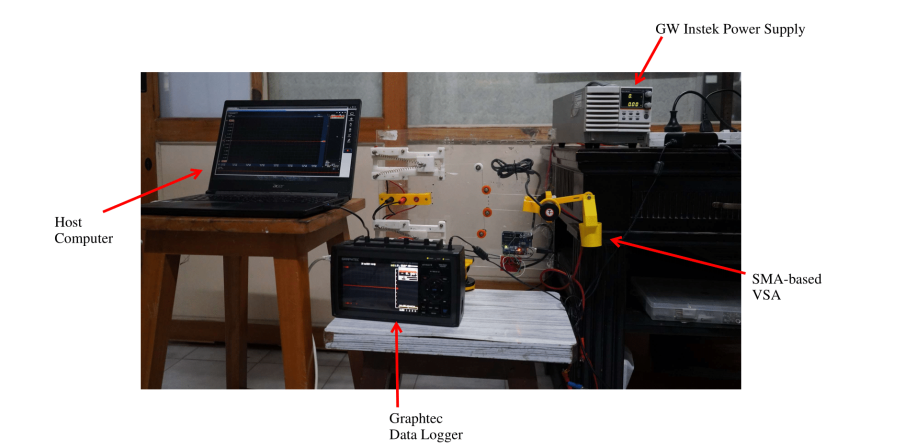
The system incorporates comprehensive analysis of Shape Memory Alloy (SMA) spring weight-bearing characteristics through Artificial Neural Networks (ANN) trained on displacement data acquired from laser-based deflection sensing, enabling accurate performance prediction under varying thermal and load conditions.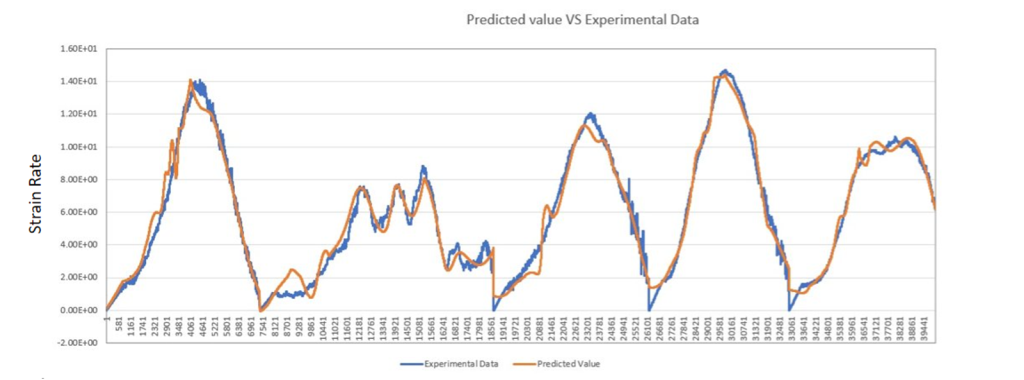
A sophisticated control framework utilizes recurrent Long Short-Term Memory (LSTM) networks to model the nonlinear, time-dependent behavior of the actuator under fluctuating inputs and temperature dynamics, while a real-time deflection-sensing system with embedded microcontroller (Arduino) and rotary encoder provides continuous feedback on actuator deformation. The project advances adaptive control capabilities by implementing Proximal Policy Optimization (PPO) within a reinforcement learning framework, effectively achieving adaptive control of Shape-Memory Alloy (SMA) actuators under complex biased loading scenarios and resulting in enhanced system robustness and learning-driven motion control. The project demo and published paper is included below.